АЁ СіГ 16РЯ МПяПЊПЁМ БЙАЁУЖЕЕАјДмАњ УЖЕЕ ПюПЕБтАќ АќАшРкИІ УЪУЛЧи \'УЖЕЕПЊЛч АэЛѓШЈ АХИЎ РкЕПУјСЄ РхКё\'ИІ АјАГ НУПЌЧпДйАэ 17РЯ Йр...'))
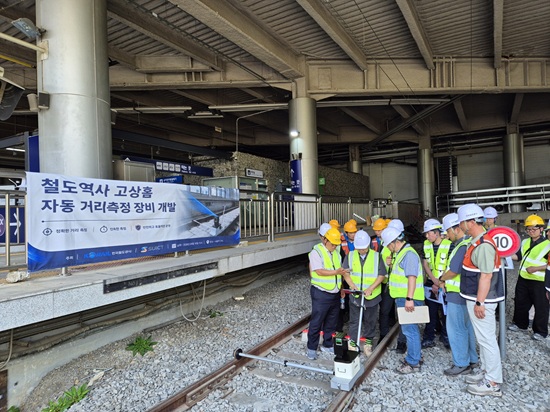
ЧбБЙУЖЕЕАјЛч(ФкЗЙРЯ)АЁ СіГ 16РЯ МПяПЊПЁМ БЙАЁУЖЕЕАјДмАњ УЖЕЕ ПюПЕБтАќ АќАшРкИІ УЪУЛЧи 'УЖЕЕПЊЛч АэЛѓШЈ АХИЎ РкЕПУјСЄ РхКё'ИІ АјАГ НУПЌЧпДйАэ 17РЯ ЙрЧћДй.
РЬЙјПЁ МБКИРЮ АэЛѓШЈ АХИЎ РкЕПАЫУј РхКёДТ БЙГЛБтМњЗЮ АГЙпЕХ МБЗЮСпНЩРЛ БтСиРИЗЮ ПТїПЭ НТАРх ЛчРЬРЧ АХИЎПЭ ГєРЬИІ УјСЄЧЯДТ РхКёДй.
ФкЗЙРЯРК НТАРхПЁМРЧ ЙпКќСќ ЛчАэПЭ ПТїАЁ НТАРхПЁ СЂУЫЧЯДТ АЭРЛ ПЙЙцЧЯБт РЇЧи СЄБтРћРИЗЮ АХИЎПЭ ГєРЬИІ СЁАЫЧи БГХыОрРкИІ ЦїЧдЧб АэАД И№ЕЮАЁ ОШРќЧб ПЉЧрРЛ Чв Мі РжЕЕЗЯ СЄЙаЧЯАд АќИЎЧЯАэ РжДй.
РЬЙј АГЙпЧАРК ЖѓРЬДй(LiDAR, Laser Imaging, Detection And Ranging) МОМПЭ ЦМПРПЁЧС(ToF, Time of Flight) МОМЗЮ ПТїПЭ НТАРх ЛчРЬ АХИЎИІ ПЌМгЧиМ УјСЄЧбДй. СЁАЫ ЕЅРЬХЭДТ НЧНУАЃРИЗЮ ШЎРЮЧв Мі РжАэ РкЕПРИЗЮ РњРхЕШДй.
ЖѓРЬДй(LiDAR)ДТ ЗЙРЬРњ КіРЛ ЙпЛчЧи Бз КћРЬ ДыЛѓ ЙАУМПЁ ЙнЛчЕЧОю ЕЙОЦПРДТ АЭРЛ ЙоОЦ ЙАУМБюСіРЧ АХИЎ ЕюРЛ УјСЄЧЯАэ ЙАУМ ЧќЛѓБюСі РЬЙЬСіШЧЯДТ БтМњРЬДй. ЦМПРПЁЧС(ToF)ДТ КћРЛ Н№ Ек ЙАУМПЁ ЙнЛчЕХ ЕЙОЦПРДТ НУАЃРЛ УјСЄЧи АХИЎИІ АшЛъЧЯДТ БтМњРЬДй.

[АќЗУ БтЛч]
- БЙГЛ СІОрЛч ПРГЪ 3ММ НТКЮМі ЁІ ПјХщАњ ХѕХщ
2026-02-20

[АќЗУ БтЛч]
- ФЋФЋПРАдРгСю, 2025Гт РћРк РќШЏ
2026-02-11
- ФЋФЋПРАдРгСю 1КаБт ПЕОїМеНЧ 124Оя Пј
2025-05-07
- ФЋФЋПРАдРгСю 4КаБт РћРк РќШЏ
2025-02-11

[АќЗУ БтЛч]
- РќПЕЙЌ НХРг ДыЧЅ, ЛяМКЛ§Иэ БИПјХѕМі ЕюЦЧ
2020-01-22

[АќЗУ БтЛч]

[АќЗУ БтЛч]
БтСИПЁДТ РлОїРкАЁ ОЦГЏЗЮБз РкЗЮ УтРдЙЎАњ НТАРх АХИЎИІ РЯСЄ АЃАнИЖДй СїСЂ УјСЄЧЯАэ БтЗЯЧиОп ЧпДй. РЬЙј РхКёАГЙпЗЮ МОМИІ ХыЧб РкЕП УјСЄАњ ЕЅРЬХЭ КаМЎРЬ АЁДЩЧи РлОїРкРЧ МїЗУЕЕПЁ ЕћИЅ УјСЄ ЦэТїИІ УжМвШЧв Мі РжДй. ЖЧЧб МБЗЮ ГЛ СЁАЫНУАЃЕЕ СйПЉ ОШРќМКРЛ ГєРЯ АЭРИЗЮ БтДыЕШДй.
ЧбЦэ, ФкЗЙРЯРК АГЙпЧАПЁ ДыЧб АјРЮБтАќ(БИЙЬРќРкСЄКИБтМњПј)РдШИ МКДЩНУЧшРЛ ПЯЗсЧпДй. ДйРНДоКЮХЭ ПЌИЛБюСі ЧіОї МвМгПЁ ЙшФЁЧи НУЙќПюПыРЛ НУЧрЧЯАэ НТАРх РЏСіАќИЎ УМАшРЧ Е№СіХа РќШЏРЛ РЇЧи РќБЙ ПЊЛчЗЮ ШЎДы РћПыЧв АшШЙРЬДй.
ОчХТШЦ ФкЗЙРЯ УЖЕЕПЌБИПјРхРК ЁАПТїПЭ НТАРх ЛчРЬРЧ АЃАн УјСЄАњ ЕЅРЬХЭ АќИЎДТ АэАД ОШРќАњ СїАсЕШ СпПфЧб ОїЙЋЁБЖѓИч ЁАСіМгРћРЮ ПЌБИ АГЙпРЛ ХыЧи ОШРќЧЯАэ ШПРВРћРЮ УЖЕЕ РЏСіАќИЎ УМАшИІ БИУрЧЯАкДйЁБАэ ЙрЧћДй.
ШФПјЧЯБт
РЬ БтЛчПЁ ДыЧи ОюЖЛАд Л§АЂЧЯНУГЊПф?
 УпУЕЧиПф
УпУЕЧиПф
 ССОЦПф
ССОЦПф
 АЈЕПРЬПЁПф
АЈЕПРЬПЁПф
 ШГЊПф
ШГЊПф
 ННЦлПф
ННЦлПф
0
0
0
0
0



 БтЛчСІКИ
БтЛчСІКИ